Computational Design of Compliant Mechanisms
Jessica McWilliams (jmcw [at] seas.upenn.edu), Wei-Hsi Chen (weicc [at] seas.upenn.edu), Cynthia Sung (crsung [at] seas.upenn.edu)
General Robotics, Automation, Sensing & Perception (GRASP) Laboratory, University of Pennsylvania, USA
Compliant mechanisms take advantage of material flexibility to produce particular geometrical changes or force response. These mechanisms are widely found [1] in nature, as well as in many manufactured products, due to their simplicity of fabrication. In particular, since compliant mechanisms can often be constructed entirely from a single material, they are able to achieve complex motions without the cost of complex assembly required for equivalent rigid-body mechanisms [2].
Previous journal club summaries have already discussed types of soft materials and mechanisms.
The purpose of this month’s journal club is to explore existing computational methods for designing and taking advantage of these structures.
Computational Design
With the growth of new techniques in digital manufacturing, high-fidelity simulation, and optimization approaches, there is an accompanying interest in how to automate design of customized products with higher complexity. In comparison to software and integrated circuits, where compilers have been extremely successful, “mechanical compilers” of the type hotly debated since the 80s [3], [4] have been difficult in part because of the large amount of coupling between physically distant parts. Attempts to automate mechanical design can be loosely categorized into two main types – assembly-based design and topology optimization of the full mechanisms – with a few more recent techniques combining the two.
Assembly-Based Design
Assembly-based design is a design framework aimed at mimicking how human engineers approach their own design work, and it is the approach predominantly found in software compilers. In this framework, a goal functionality for a compliant mechanism is broken down into simple motions, which are then individually achieved from a library of parametrized designs (which may be called “gadgets” [5], “metamaterials” [6], “cells” [7], or simply “building blocks” [2] depending on the research community and application) and combined together. These modules are carefully structured materials — often consisting of periodically arranged building blocks — that exhibit properties and functionalities that differ from and surpass those of their constituent materials rather than simply combining them [6]. Assuming that the full design can actually be modularized in this way, an assembly-based design approach simplifies the design process since each individual motion can map only to a small set of modules, thus limiting the search space. The downside is that this modularization limits cross-module optimization, sometimes leading to mechanisms that are larger or more complex overall.
Parameterized Mechanism Modules: Modules can be either 2D [8] or 3D [9], [10] and take advantage of a variety of fabrication methods, including 3D printing [11], folding [12], [13], casting and molding, and combinations [14]. These designs are parameterized to allow the designer limited customization at design time and are often periodic in order to scale to designs of arbitrary size. Adjustable parameters include discrete parameters, such as a fixed number of shapes in a tessellated design [15], and continuous parameters [11], [16], [17], such as orientation, length dimensions, and overlap of different units.
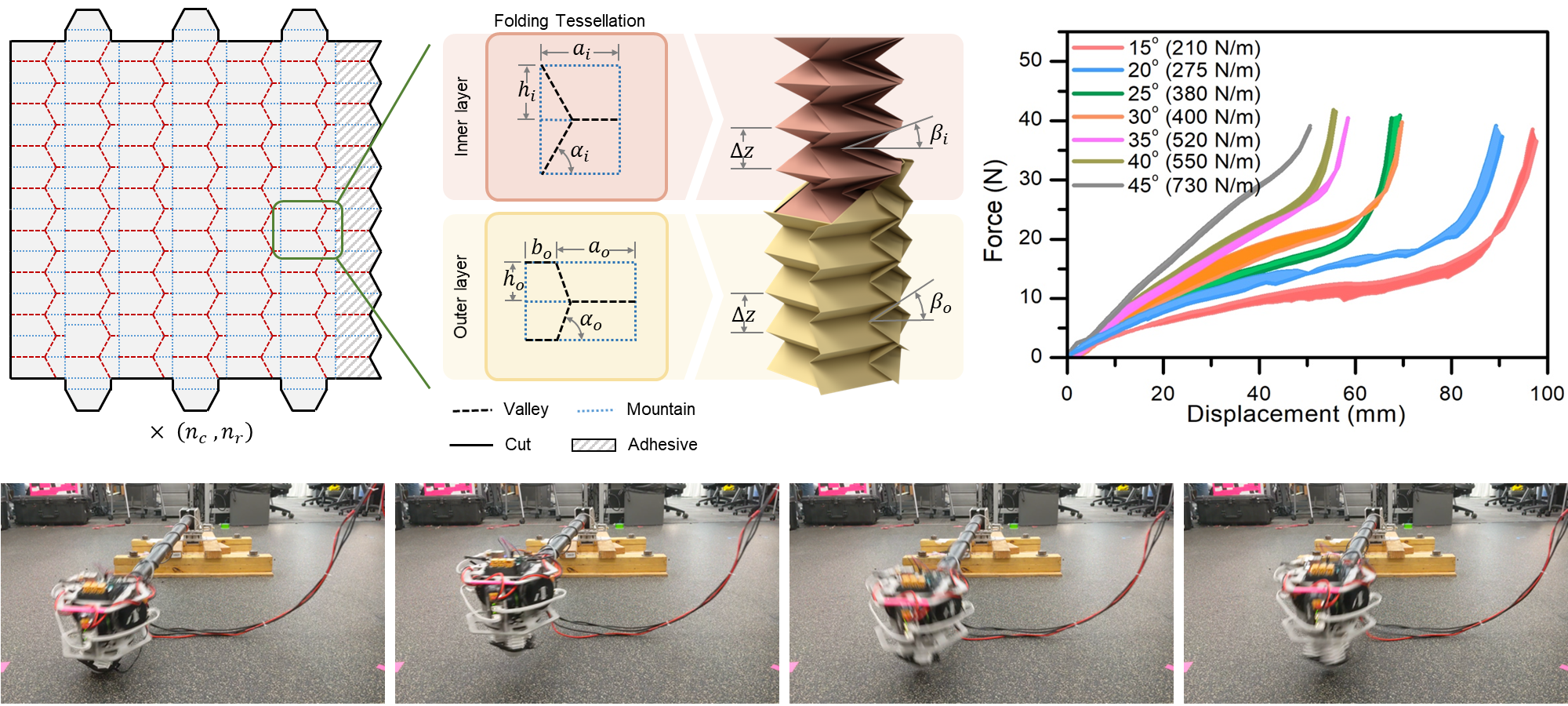
The expert designer who is creating the module dictates the general design geometry and the adjustable parameters. The set of parameters is often chosen in such a way as to expose important functional (motion/force) outputs with as few parameters as possible. As one particular example, for an application as a power cascading device in a dynamical robot, the key functional output would be energy storage. Traditionally, the power needed to perform dynamical tasks comes from the high power density actuators. However, high power can also be achieved by storing and releasing of energies produced from actuators into the compliant material itself [1], thus reducing dependence on choosing a right actuator for dynamical behavior. Figure 1 shows one example of an origami module that was particularly designed for this purpose. Despite a large number of available geometric parameters, only one is needed to manipulate the stiffness of the design and its capacity for energy storage. By tuning this particular parameter (and potentially ignoring all others), the design space is reduced, but the resulting design is still able to satisfy the functional needs of a 2.5 kg robot to perform hopping tasks requiring energy storage up to 1.23 J and delivering power up to 20 W [18], [19].
Figure 1. Top right: Sample origami tessellation from [18], [19], where changing the alpha parameter in the fold pattern affects the beta parameter of the folded state. Top right: force-displacement curves under changing beta parameters. Bottom: Demonstrations of the fold pattern as applied to a hopping robot requiring energy storage up to 1.23 J.
Module Assembly: Successful composition of these modules into full compliant mechanisms has two main steps: 1) individual modules must be chosen that satisfy subsystem requirements, and 2) the modules must be compatible with each other (i.e., they are able to be composed). Approaches to these steps basically fall into two categories:
- Composition Rules and Shape Grammars: Grammars are rules that dictate what, when, and how modules should be connected together. Well-designed grammars attempt to distill a constrained design problem into a well-defined set of design rules. For example, a description of composing motion might look like: “A translation module A can be connected to a rotation module B to make a 2 degree-of-freedom mechanism that translates and rotates.” A rule for physically composing the modules might look like: “If module A and module B are supposed to be connected rigidly, then fuse edge A1 on module A to edge B1 on module B so that they can be 3D printed a single unit.” Examples of grammars include those created for origami shapes [20], mechanical couplers [21], and soft robots [22].
In order to ensure that a grammar is expressive enough to encompass the full desired design space, it needs to include many rules. For a complex design space, some of these rules may overlap. Fully automated design therefore augment grammars with optimization and search strategies, often stochastic [21], [22], that search among the different compositions and module parameters for a functional solution.
The strength of a grammar is that it simplifies the design space, keeping the design problem tractable and allowing compliant mechanisms to be designed quickly and correctly. However, the reliance on an expert engineer to generate those rules means that grammars can easily be designed badly, arbitrarily restricting outputs to a small set of suboptimal designs. - Interactive Design: Interactive tools aim to overcome these limitations by using human intuition to simplify the design search problem. Systems such as [23], for example, allow users to combine links and a known set of compliant joints together in near-arbitrary ways while leveraging rapid simulation approaches to provide the user with real-time feedback on the behavior of the mechanism.
Topology Optimization
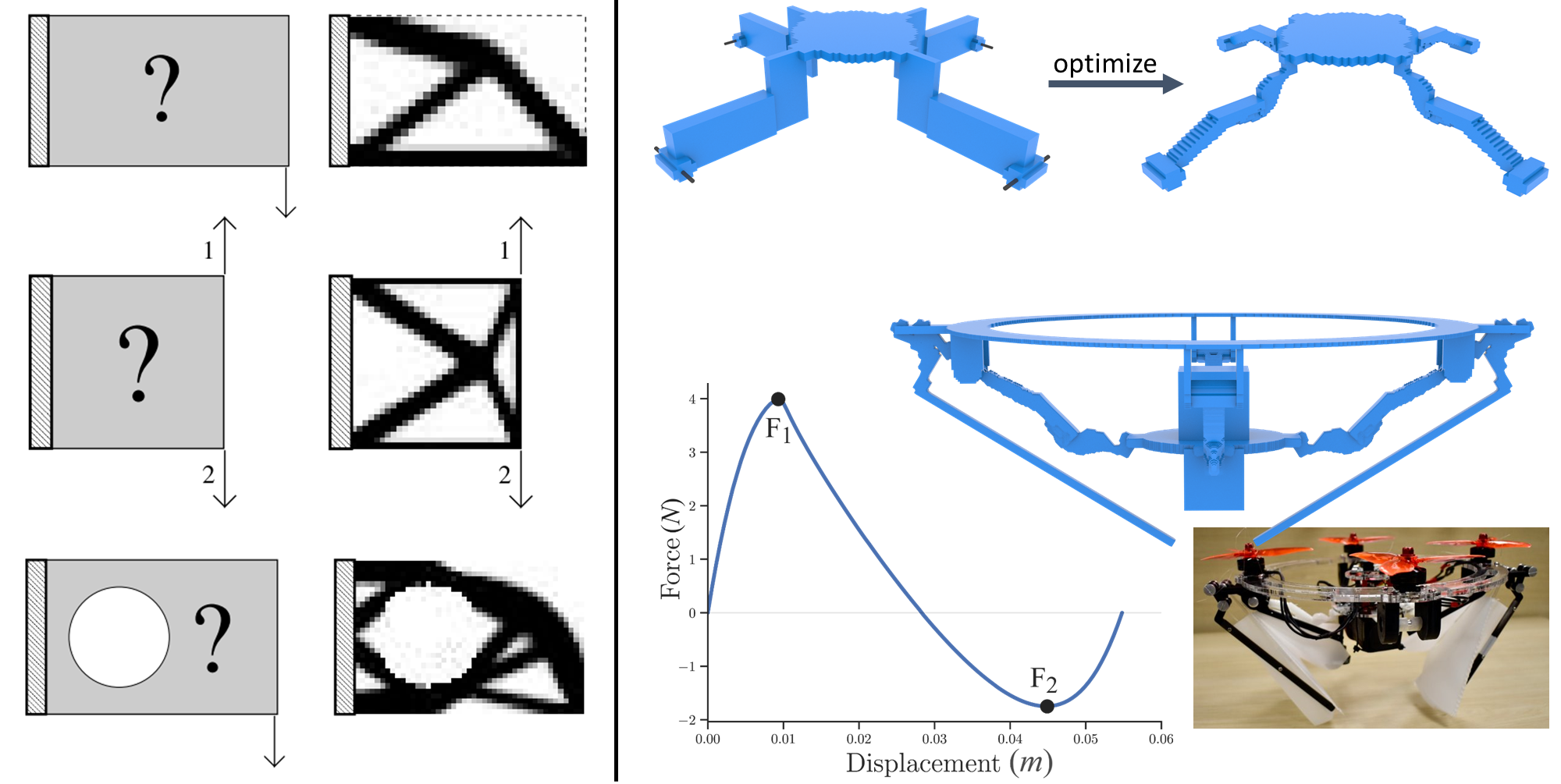
In contrast with assembly-based methods, topology optimization approaches aim to design a compliant mechanism in its entirety. The most popular technique is a density based approach (e.g., [24]): the starting condition is a uniform-density block of discretized material, and gradient descent is performed over the densities of the cells to minimize an objective, typically nodal displacement under a known force. For simplicity of manufacturing, the result can be regularized such that it converges to a grid of zeros (no material) and ones (material), and then the part can be fabricated. When combined with differentiable simulation approaches, these techniques can generate a wide variety of complex geometries [25], as illustrated in Figure 2.
Figure 2. Examples results from topology optimization. Left: Results from [24] showing the results of optimizing material density for minimum compliance in a cantilever with varying loads. Right: Results from [26] using topology optimization to design a bistable beam in a dynamical hybrid aerial vehicle.
While the majority of existing topology optimization methods have been used to minimize compliance or deformation in a structure, the same techniques have also been demonstrated in design of compliant mechanisms, for example, bistable beams that leverage snap-through buckling. In this case, the force-displacement curve between the two stable equilibria of the bistable beam consists of a maximum force F1 which is positive and a minimum force F2 which is negative, and the objective of the optimization is to minimize F2 under the constraint that F1 is positive [27].
Because such topology optimization methods are built around full simulations of the compliant mechanism, they are typically able to pack greater functionality into a smaller volume than assembly-based methods and are additionally able to handle forces from contacts [28] and mechanism dynamics. For example, Figure 2 shows an example of an optimized bistable mechanism applied in a soft hybrid aerial vehicle (HAV) [26]. In contrast to previous approaches to bistable switching mechanisms where a force differential is directly applied to the ends and center of the bistable mechanism, the soft HAV leverages its own inertia to generate a dynamic force to achieve switching behavior.
At the same time, topology optimization approaches often present challenges to novice designers since the quality of the results depend heavily on the precise objective and how the parameters of the optimization (e.g., resolution of the mesh, regularization terms, etc.) are tuned. Further, when large mechanisms or mechanisms with fine features are required, the size of the mesh (and thus the optimization problem) grows, quickly causing the problem to be computationally intractable.
Hierarchical Approaches
Hybrid approaches thus aim to combine the best qualities of assembly-based design (i.e., low dimensional search space) with those of topology optimization (i.e., design flexibility). Work such as [29], [30], for example, considers a hierarchical scheme. In this scheme, optimization and search approaches are used to automatically generate modules, which, because they are represented and simulated individually, can contain fine features. The representation of the identified modules is then compressed to contain only the most important mechanics properties, and these modules are used in a higher-level mechanism design optimization, which can now occur with lower resolution. Even when a full hierarchical optimization scheme is not used, similar strategies of layering minor parameter optimizations on top of assembly-based designs (e.g., [23]) can provide additional design improvements at low computational cost.
Future Outlook
Compliant mechanisms form a large portion of designs found in engineering today, spanning applications in manufacturing, robotics, healthcare, and household devices, among others. Additionally, the growth of digital manufacturing technologies is now enabling customized compliant mechanisms to be fabricated on demand. Computation can play a central role in simulating, composing, and optimizing these mechanisms so that designing and using them can be quicker and more efficient.
We have attempted here to summarize at a high level the various approaches to computational design, but we also invite others to share their perspectives and experiences, and we look forward to discussing with you all in the comments.
References
- M. Ilton et al., “The principles of cascading power limits in small, fast biological and engineered systems,” Science, vol. 360, no. 6387, 2018.
- L. L. Howell, S. P. Magleby, and B. M. Olsen, Handbook of Compliant Mechanisms. West Sussex, UK: Wiley, 2013.
- A. C. Ward, “Mechanical design compilers,” in Formal Engineering Design Synthesis, E. K. Antonsson and J. Cagan, Eds. Cambridge, UK: Cambridge University Press, 2001.
- E. K. Antonsson, “The potential for mechanical design compilation,” Res. Eng. Des., vol. 9, no. 4, pp. 191–194, Dec. 1997.
- T. A. Evans, R. J. Lang, S. P. Magleby, and L. L. Howell, “Rigidly foldable origami gadgets and tessellations,” R. Soc. Open Sci., vol. 2, no. 9, p. 150067, Sep. 2015.
- K. Bertoldi, V. Vitelli, J. Christensen, and M. van Hecke, “Flexible mechanical metamaterials,” Nat. Rev. Mater., vol. 2, no. 11, p. 17066, Nov. 2017.
- A. Ion et al., “Metamaterial mechanisms,” UIST 2016 - Proc. 29th Annu. Symp. User Interface Softw. Technol., pp. 529–539, 2016.
- S. Li, H. Fang, S. Sadeghi, P. Bhovad, and K. W. Wang, “Architected origami materials: How folding creates sophisticated mechanical properties,” Adv. Mater., vol. 31, no. 5, pp. 1–18, 2019.
- J. T. B. Overvelde et al., “A three-dimensional actuated origami-inspired transformable metamaterial with multiple degrees of freedom,” Nat. Commun., vol. 7, p. 10929, 2016.
- S. Babaee, J. Shim, J. C. Weaver, E. R. Chen, N. Patel, and K. Bertoldi, “3D soft metamaterials with negative Poisson’s ratio,” Adv. Mater., vol. 25, no. 36, pp. 5044–5049, 2013.
- Y. Jiang and Y. Li, “3D printed auxetic mechanical metamaterial with chiral cells and re-entrant cores,” Sci. Rep., vol. 8, no. 1, pp. 1–11, 2018.
- Y. Tang, G. Lin, L. Han, S. Qiu, S. Yang, and J. Yin, “Design of hierarchically cut hinges for highly stretchable and reconfigurable metamaterials with enhanced strength,” Adv. Mater., vol. 27, no. 44, pp. 7181–7190, Nov. 2015.
- Y. Tang, G. Lin, S. Yang, Y. K. Yi, R. D. Kamien, and J. Yin, “Programmable kiri-kirigami metamaterials,” Adv. Mater., vol. 29, no. 10, p. 1604262, Mar. 2017.
- Y. Tang, Y. Li, Y. Hong, S. Yang, and J. Yin, “Programmable active kirigami metasheets with more freedom of actuation,” Proc. Natl. Acad. Sci. U. S. A., vol. 116, no. 52, pp. 26407–26413, 2019.
- A. Ion, D. Lindlbauer, P. Herholz, M. Alexa, and P. Baudisch, “Understanding metamaterial mechanisms,” Conf. Hum. Factors Comput. Syst. - Proc., pp. 1–14, 2019.
- L. A. Shaw, S. Chizari, M. Dotson, Y. Song, and J. B. Hopkins, “Compliant rolling-contact architected materials for shape reconfigurability,” Nat. Commun., vol. 9, no. 1, pp. 1–12, 2018.
- T. Tancogne-Dejean, M. Diamantopoulou, M. B. Gorji, C. Bonatti, and D. Mohr, “3D plate-lattices: An emerging class of low-density metamaterial exhibiting optimal isotropic stiffness,” Adv. Mater., vol. 30, no. 45, pp. 1–6, 2018.
- W.-H. Chen et al., “A programmably compliant origami mechanism for dynamically dexterous robots,” IEEE Robot. Autom. Lett., vol. 5, no. 2, pp. 2131–2137, Apr. 2020.
- W.-H. Chen, S. Misra, J. D. Caporale, D. E. Koditschek, S. Yang, and C. R. Sung, “A tendon-driven origami hopper triggered by proprioceptive contact detection,” in 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), 2020, pp. 373–380.
- Y. Yu, T. C. K. Hong, A. Economou, and G. H. Paulino, “Rethinking origami: A generative specification of origami patterns with shape grammars,” CAD Comput. Aided Des., vol. 137, p. 103029, 2021.
- N. G. Ulu, S. Coros, and L. B. Kara, “Designing coupling behaviors using compliant shape optimization,” CAD Comput. Aided Des., vol. 101, pp. 57–71, 2018.
- M. Van Diepen and K. Shea, “A Spatial Grammar Method for the Computational Design Synthesis of Virtual Soft Locomotion Robots,” J. Mech. Des. Trans. ASME, vol. 141, no. 10, pp. 1–10, 2019.
- V. Megaro, J. Zehnder, M. Bächer, S. Coros, M. Gross, and B. Thomaszewski, “A computational design tool for compliant mechanisms,” ACM Trans. Graph., vol. 36, no. 4, 2017.
- O. Sigmund, “A 99 line topology optimization code written in matlab,” Struct. Multidiscip. Optim., vol. 21, no. 2, pp. 120–127, 2001.
- Y. Li, X. Li, M. Li, Y. Zhu, B. Zhu, and C. Jiang, “Lagrangian–Eulerian multidensity topology optimization with the material point method,” Int. J. Numer. Methods Eng., vol. 122, no. 14, pp. 3400–3424, 2021.
- X. Li, J. McWilliams, M. Li, C. Sung, and C. Jiang, “Soft hybrid aerial vehicle via bistable mechanism,” in IEEE International Conference on Robotics and Automation, 2021.
- A. Bhattacharyya, C. Conlan-Smith, and K. A. James, “Design of a bi-stable airfoil with tailored snap-through response using topology optimization,” CAD Comput. Aided Des., vol. 108, pp. 42–55, 2019.
- N. D. Mankame and G. K. Ananthasuresh, “Topology optimization for synthesis of contact-aided compliant mechanisms using regularized contact modeling,” Comput. Struct., vol. 82, no. 15–16, pp. 1267–1290, 2004.
- D. Chen, M. Skouras, B. Zhu, and W. Matusik, “Computational discovery of extremal microstructure families,” Sci. Adv., vol. 4, no. 1, pp. 1–8, 2018.
- L. A. Shaw, F. Sun, C. M. Portela, R. I. Barranco, J. R. Greer, and J. B. Hopkins, “Computationally efficient design of directionally compliant metamaterials,” Nat. Commun., vol. 10, no. 1, pp. 1–13, 2019.
| Attachment | Size |
|---|---|
| figure1.png | 1.84 MB |
| figure2.png | 862.65 KB |
{kind=link}
{kind=link}
Energy barrier of the bistable structures
Dear Jessica, Wei-Hsi, and Cynthia,
Thanks a lot for the very interesting summary. It is a very nice integration of mechanics design and funtional structures.
I have some questions about the example in Figure 2 and also general multistable structures. Your analysis currently focues on the two extrme forces at the stable states. Did you analyze the energy barriers between the stable state and the transition state (saddle point in the energy lanscape)? How the forces and energy barriers can be related to your structure design?
More specifically for the soft hyrbrid aerial vehicle, you used interia to help the snap through deformation. Although it is indeed a dynamical force, I feel it is more like an energy impulse (kinetic energy) to the system. Therefore, the structure may not be strictly under force-control loading, and the energy barriers may be a more accurate cretiera to determine the transition process.
Another question is about the absolute values of F1 and F2. I noticed you are maximizing their difference with constraints making the structure bistable. If one of the force is very small, the state may be easily perturbed by eviromental nosie. Is there strategy to set a reasonable values of the forces which can also be acheived?
Best,
Teng