Dear all,
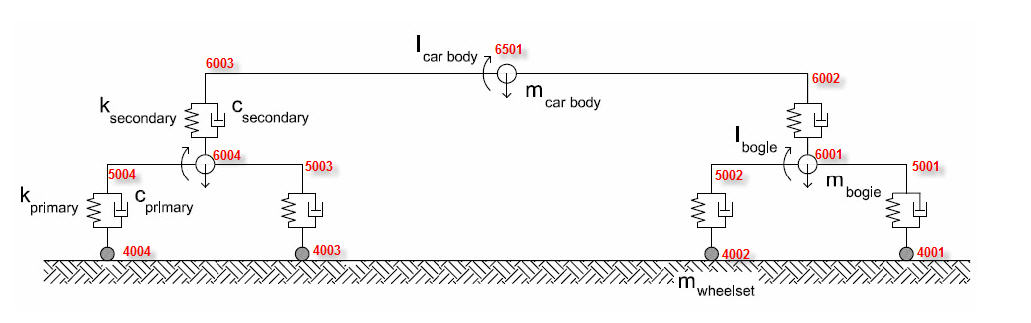
I'm doing a dynamic analysis and optimization of high speed railway bridges. After developing the abaqus input file (*inp), the following errors have occured and I was unable to solve them. I have attached a picture showing the node number that I used to model the train. the car body and the bogies are model as a rigid body in which nodes 6001,6004 and 6501 are the reference nodes.
1. An overconstraint problem. it says "Zero pivot when processing Node 6004 d.o.f 2, node 6004 d.o.f 6 and node 6001 d.o.f 6
2. I think due to this problem, the force and moment equlibriums did not converged. Sometimes the contact constraints did not converged
3. when I use the sprung mass model of the train, I clearly define the master and slave surfaces. the rail is the master surface the wheel nodes are slave nodes. the surface interaction, surface behaviour (no separation) and the contact pairs are defined as clearly as possible. But i don't know what's wrong with it, after moving some distance the wheel will get out of the rail.
Please have alook part of the input file for both cases and forward me your valuable comments. Thanks alot.
Case 1
***Train Wagon Model
*Node, Nset=WheelNodes
4001,-90,0
4002,-92.5,0
4003,-107.5,0
4004,-110,0
*Node, Nset=Bogie1Nodes
5001,-90,1
5002,-92.5,1
*Node, Nset=Bogie2Nodes
5003,-107.5,1
5004,-110,1
*Node, Nset=Carbody1Nodes
6002,-91.25,2
6003,-108.75,2
*Node
6001,-91.25,1
6004,-108.75,1
6501,-100,2
*Surface, type=ELEMENT, name=master
ExRail_Left,SPOS
Rail,SPOS
ExRail_Right,SPOS
*Surface, type=NODE, name=slave
WheelNodes, 1.
**INTERACTION PROPERTIES
**
*Surface Interaction, name=ContactProp
1.
*Friction
0.1
*SURFACE BEHAVIOR, PRESSURE-OVERCLOSURE=HARD
**
*Element, type=Spring2, elset=SpringPrimary
7501, 4001, 5001
7502, 4002, 5002
7503, 4003, 5003
7504, 4004, 5004
*Element, type=Spring2, elset=SpringSecondary
7601, 6001, 6002
7602, 6004, 6003
*Element, type=Dashpot2, elset=DashpotPrimary
8001, 4001, 5001
8002, 4002, 5002
8003, 4003, 5003
8004, 4004, 5004
*Element, type=Dashpot2, elset=DashpotSecondary
8501, 6001, 6002
8502, 6004, 6003
*Element, type=Mass, elset=mWheel
10001,4001
10002,4002
10003,4003
10004,4004
*Element, type=Mass, elset=mbogie
10020, 6001
10021, 6004
*Element, type=Mass, elset=mcarbody
10030, 6501
*Spring, elset=SpringPrimary
2 ,2
1.17e+06
*Spring, elset=SpringSecondary
2 ,2
1.89e+05
*Dashpot, elset=DashpotPrimary
2 ,2
19600.
*Dashpot, elset=DashpotSecondary
2 ,2
40000
*MASS, elset=mWheel
2100
*MASS, elset=mbogie
2600
*MASS, elset=mcarbody
26100
*Element, Type=Rotaryi, ElSet=IBogie
10501,6001
10502,6004
*Element, Type=Rotaryi, ElSet=ICarbody
10509,6501
*Rotary Inertia, elset=IBogie
2106,1424,2600,0,0,0
*Rotary Inertia, elset=ICarbody
84.56e+03,1278.9e+03,1107.73e+03,0,0,0
*Element, type=RB2D2, elset=Bogie1
9001,5001,6001
9002,6001,5002
*Element, type=RB2D2, elset=Bogie2
9003,5003,6004
9004,6004,5004
*Rigid Body, Elset=Bogie1, Ref Node=6001, Position=Input, PIN Nset=Bogie1Nodes
*Rigid Body, Elset=Bogie2, Ref Node=6004, Position=Input, PIN Nset=Bogie2Nodes
*Element, type=RB2D2, elset=Car1
9501,6002,6501
9502,6501,6003
*Rigid Body, Elset=Car1, Ref Node=6501, Position=Input, PIN Nset=Carbody1Nodes
*BOUNDARY
AppGroundNodes_Left,Encastre
AppGroundNodes_Right,Encastre
401,2
433,PINNED
544,PINNED
576,2
2429,1
3204,1
WheelNodes,1,1
6001,1,1
6004,1,1
6501,1,1
** Interaction: ContactCondition
*Contact Pair, interaction=ContactProp
slave, master
**STEP:gravity
**
*Step, name=gravity
*Static
**
** LOADS
**
** Name: Gravity-1 Type:Gravity
*Dload
, GRAV, 10., 0., -1.
**
** OUTPUT REQUESTS
**
** FIELD OUTPUT: F-Output-1
**
*Output, field, variable=PRESELECT
**
** HISTORY OUTPUT: H-Output-1
**
*Output, history, variable=PRESELECT
*End Step
**------------------------------------------------------------------
**
**Step: Step-2-dynamic
**
*Step, name=Step-2-dynamic, inc=18896
*Dynamic, alpha=-0.05,direct
0.0005,9.198
**
** BOUNDARY CONDITIONS
*Boundary
WheelNodes,1,1,511
6001,1,1,511
6004,1,1,511
6501,1,1,511
**
** OUTPUT REQUESTS
**
**
** FIELD OUTPUT: F-Output-2
**
*Output, field, variable=PRESELECT
**
** HISTORY OUTPUT: H-Output-1
**
*Output, history, variable=PRESELECT
*Node output, nset=BridgeNodes
A2,U2
*NODE PRINT, nset=BridgeNodes
A2,U2
*END STEP
| Attachment | Size |
|---|---|
| train model.jpg | 44.01 KB |
{kind=link}